Un sensore in senso generale è un dispositivo che converte una quantità fisica in un'altra, conveniente per l'elaborazione, la trasmissione o la successiva conversione. Di norma, la prima grandezza è fisica, non suscettibile di misura diretta (temperatura, velocità, spostamento, ecc.), e la seconda è un segnale elettrico o ottico. Una nicchia nel campo degli strumenti di misura è occupata dai sensori, il cui elemento principale è un induttore.
Contenuto
Come funziona il sensore di induttanza e come funziona
Secondo il principio di funzionamento, i sensori induttivi sono attivi, ovvero richiedono un generatore esterno per funzionare. Fornisce un segnale con una data frequenza e ampiezza all'induttore.
La corrente che passa attraverso le spire della bobina crea un campo magnetico. Se un oggetto conduttivo entra nel campo magnetico, i parametri della bobina cambiano.Resta solo da correggere questo cambiamento.
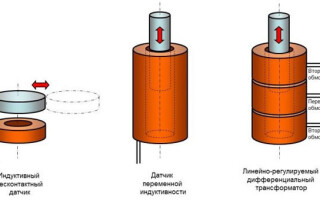
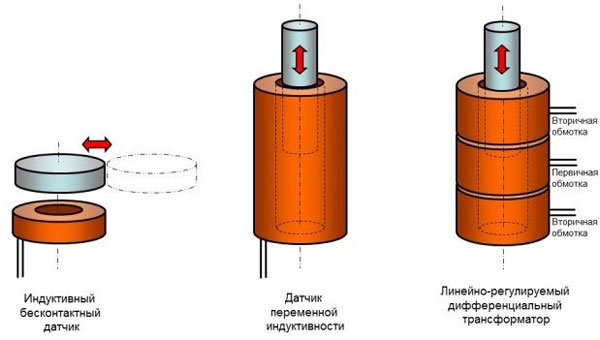
Semplici sensori senza contatto reagiscono alla comparsa di oggetti metallici nella zona vicina dell'avvolgimento. Questo cambia l'impedenza della bobina, questa modifica deve essere convertita in un segnale elettrico, amplificare e (o) fissare il passaggio della soglia utilizzando un circuito di confronto.
I sensori di un altro tipo rispondono ai cambiamenti nella posizione longitudinale dell'oggetto che funge da nucleo della bobina. Quando la posizione dell'oggetto cambia, si muove dentro o fuori la bobina, cambiando così la sua induttanza. Questo cambiamento può essere convertito in un segnale elettrico e misurato. Un'altra versione di tale sensore è quando un oggetto si avvicina alla bobina dall'esterno. Ciò fa diminuire l'induttanza a causa dell'effetto suolo.
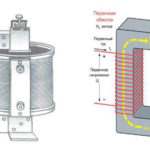
Un'altra versione del sensore di spostamento induttivo è un trasformatore differenziale a regolazione lineare (LVDT). Si tratta di una bobina composita, realizzata nel seguente ordine:
- avvolgimento secondario 1;
- avvolgimento primario;
- avvolgimento secondario 2.
Il segnale dal generatore viene inviato all'avvolgimento primario. Il campo magnetico creato dalla bobina centrale induce un EMF in ciascuna delle secondarie (principio del trasformatore). Il nucleo, quando si muove, modifica la connessione reciproca tra le bobine, modificando la forza elettromotrice in ciascuno degli avvolgimenti. Questa modifica può essere corretta dal circuito di misurazione. Poiché la lunghezza del nucleo è inferiore alla lunghezza totale della bobina composita, la posizione dell'oggetto può essere determinata in modo inequivocabile dal rapporto EMF negli avvolgimenti secondari.
Sullo stesso principio - un cambiamento nell'accoppiamento induttivo tra gli avvolgimenti - viene costruito un sensore di rotazione.È costituito da due bobine coassiali. Il segnale viene applicato a uno degli avvolgimenti, l'EMF nel secondo dipende dall'angolo di rotazione reciproco.
Dal principio di funzionamento, è ovvio che i sensori induttivi, indipendentemente dal design, sono senza contatto. Funzionano a distanza e non richiedono il contatto diretto con l'oggetto controllato.
Vantaggi e svantaggi dei sensori induttivi
I vantaggi dei sensori di tipo induttivo includono principalmente:
- affidabilità del progetto;
- mancanza di connessioni di contatto;
- elevata potenza di uscita, che riduce l'influenza del rumore e semplifica il circuito di controllo;
- alta sensibilità;
- la capacità di lavorare da fonti di tensione alternata di frequenza industriale.
Lo svantaggio principale dei sensori di tipo induttivo è la loro dimensione, peso e complessità di fabbricazione. Per le bobine di avvolgimento con i parametri indicati, è necessaria un'attrezzatura speciale. Inoltre, la necessità di mantenere accuratamente l'ampiezza del segnale dall'oscillatore principale è considerata negativa. Quando cambia, cambia anche l'area della sensibilità. Poiché i sensori funzionano solo a corrente alternata, il mantenimento dell'ampiezza diventa un certo problema tecnico. Direttamente (o tramite un trasformatore step-down) non sarà possibile collegare il sensore a una rete domestica o industriale: in esso le fluttuazioni di tensione in ampiezza o frequenza possono raggiungere anche il 10% in modalità normale, il che rende inaccettabile la precisione della misurazione .
Inoltre, l'accuratezza della misurazione può essere influenzata da:
- campi magnetici di terze parti (la schermatura del sensore è impossibile in base al principio del suo funzionamento);
- pickup EMF di terze parti nei cavi di alimentazione e misurazione;
- errori di fabbricazione;
- errore caratteristico del sensore;
- giochi o deformazioni nel sito di installazione del sensore che non influiscono sulle prestazioni complessive;
- dipendenza dell'accuratezza dalla temperatura (i parametri del filo dell'avvolgimento cambiano, inclusa la sua resistenza).
L'incapacità dei sensori di induttanza di rispondere alla comparsa di oggetti dielettrici nel loro campo magnetico può essere attribuita a vantaggi e svantaggi. Da un lato, ciò limita la portata della loro applicazione. Lo rende invece insensibile alla presenza di sporco, grasso, sabbia, ecc. sugli oggetti monitorati.
La conoscenza delle carenze e delle possibili limitazioni nel funzionamento dei sensori induttivi consente un uso razionale dei loro vantaggi.
Portata dei sensori induttivi
I sensori di prossimità induttivi sono spesso usati come finecorsa. Tali dispositivi si sono diffusi:
- nei sistemi di sicurezza, come sensori per l'apertura non autorizzata di finestre e porte;
- nei sistemi di telemeccanica, come sensori della posizione finale di unità e meccanismi;
- nella vita di tutti i giorni negli schemi per indicare la posizione chiusa di porte, persiane;
- per contare gli oggetti (ad esempio, spostandosi lungo il nastro trasportatore);
- determinare la velocità di rotazione degli ingranaggi (ogni dente, passando accanto al sensore, crea un impulso);
- in altre situazioni.

Gli encoder angolari possono essere utilizzati per determinare gli angoli di rotazione di alberi, ingranaggi e altri componenti rotanti, nonché gli encoder assoluti. Inoltre, tali dispositivi possono essere utilizzati in macchine utensili e dispositivi robotici insieme a sensori di posizione lineare. Dove è necessario conoscere esattamente la posizione dei nodi dei meccanismi.
Esempi pratici di implementazione di sensori induttivi
In pratica, i progetti di sensori induttivi possono essere implementati in diversi modi. L'esecuzione e l'inclusione più semplici è per un sensore singolo a due fili, che monitora la presenza di oggetti metallici nella sua zona di sensibilità. Tali dispositivi sono spesso realizzati sulla base di un nucleo a forma di E, ma questo non è un punto fondamentale. Tale implementazione è più facile da produrre.
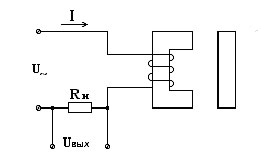
Quando la resistenza della bobina cambia, la corrente nel circuito e la caduta di tensione attraverso il carico cambiano. È possibile eseguire il commit di queste modifiche. Il problema è che la resistenza del carico diventa critica. Se è troppo grande, le variazioni di corrente quando appare un oggetto di metallo saranno relativamente piccole. Ciò riduce la sensibilità e l'immunità ai disturbi del sistema. Se è piccolo, la corrente nel circuito sarà grande, sarà necessario un sensore più resistente.
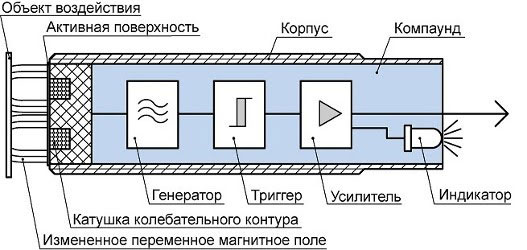
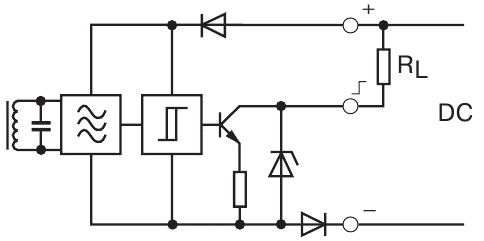
Pertanto, esistono modelli in cui il circuito di misurazione è integrato nell'alloggiamento del sensore. Il generatore genera impulsi che alimentano l'induttore. Quando viene raggiunto un certo livello, il grilletto si attiva, passando dallo stato 0 a 1 o viceversa. L'amplificatore buffer amplifica il segnale in termini di potenza e (o) tensione, accende (spegne) il LED ed emette un segnale discreto al circuito esterno.
Il segnale di uscita può essere formato:
- da elettromagnetico o relè a stato solido – zero o un livello di tensione;
- "contatto secco" relè elettromagnetico;
- collettore aperto transistor (strutture n-p-n o p-n-p).
In questo caso sono necessari tre fili per collegare il sensore:
- cibo;
- filo comune (0 volt);
- filo di segnale.
Tali sensori possono anche essere alimentati da tensione continua. Gli impulsi all'induttanza sono formati per mezzo di un generatore interno.
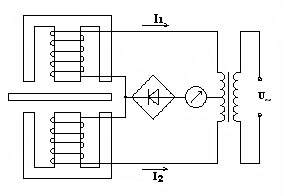
Gli encoder differenziali vengono utilizzati per il monitoraggio della posizione. Se l'oggetto controllato è simmetrico rispetto a entrambe le bobine, la corrente che le attraversa è la stessa. Quando un avvolgimento viene spostato verso il campo, si verifica uno squilibrio, la corrente totale cessa di essere uguale a zero, che può essere registrata da un indicatore con una freccia al centro della scala. L'indicatore può essere utilizzato per determinare sia l'entità dello spostamento che la sua direzione. Invece di un dispositivo puntatore, è possibile utilizzare uno schema di controllo che, dopo aver ricevuto informazioni su un cambiamento di posizione, emetterà un segnale, adotterà misure per allineare l'oggetto, apporterà modifiche al processo tecnologico, ecc.

I sensori realizzati secondo il principio dei trasformatori differenziali regolabili linearmente sono prodotti sotto forma di strutture complete, che sono un telaio con avvolgimenti primari e secondari e un'asta che si muove all'interno (può essere caricata a molla). I fili vengono estratti per inviare un segnale dal generatore e rimuovere l'EMF dagli avvolgimenti secondari. Un oggetto controllato può essere fissato meccanicamente all'asta. Può anche essere costituito da un dielettrico: solo la posizione dello stelo è importante per la misurazione.
Nonostante alcune carenze intrinseche, il sensore induttivo chiude molte aree associate al rilevamento senza contatto di oggetti nello spazio.Nonostante il costante sviluppo della tecnologia, questo tipo di dispositivo non lascerà il mercato dei dispositivi di misura nel prossimo futuro, perché il suo funzionamento si basa sulle leggi fondamentali della fisica.
Articoli simili: